Target Outcome
To define the mechanical relationships between different subcomponents of the knee models using a directed graph. This will allow the user to define an assembly of a limited portion of the entire knee model while properly referencing components of other portions of the model that are not included. For example, an individual ligament can be simulated using experimental kinematics by traversing the knee model graph to obtain for the relative motion of the reference points for the tibia and femur in order to determine mesh convergence. An input file format is defined to specify the internal data structure for the knee model graph. This strategy provides a universal solution, which can be applied to other complex, multibody models in the future.
Open Knee(s) Model Graph
[https://simtk.org/websvn/wsvn/openknee/doc/img/knee_model_graph.png]
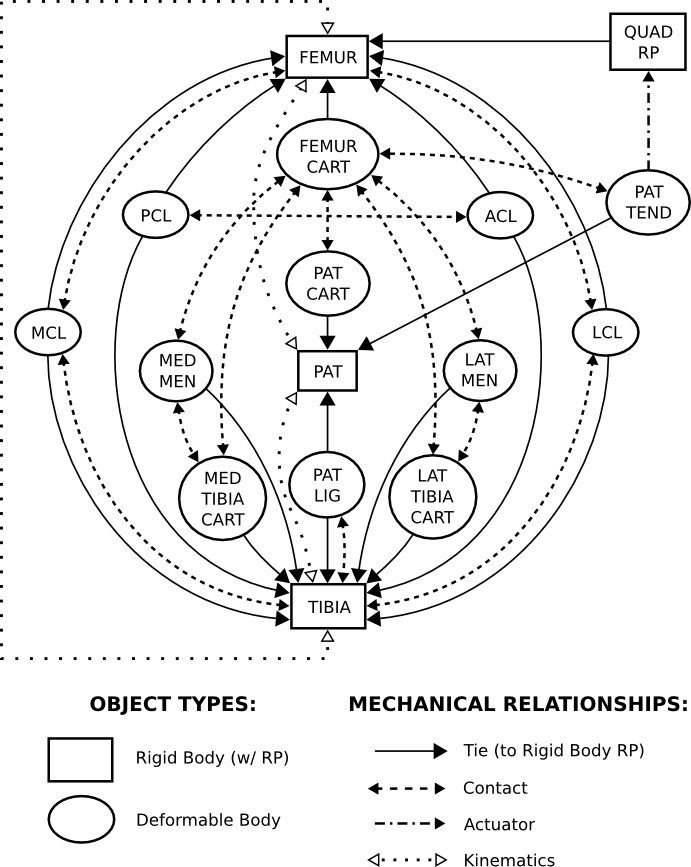{kind=link}
Model Graph Input File Syntax
The different types of mechanical relationship that can be defined between different components of the model will be identified by keywords, corresponding to those in the diagram of the knee model graph shown above:
- tie
- contact (first object is master, second object is slave)
- actuator
- kinematics (transformations for second object with respect to first)
The syntax to define each mechanical relationship type in the input file used to define the model graph data structure is as follows:
[1] ObjectName_1 tie GeomSetName_1 ObjectName_2 RefPointName_2 [2] ObjectName_3 contact GeomSetName_3 ObjectName_4 GeomSetName_4 [3] ObjectName_5 actuator GeomSetName_5 ObjectName_6 RefPointName_6 [4] ObjectName_7 kinematics RefPointName_7 ObjectName_8 RefPointName_8 ... [N] ...